二维排样算法-重心临界多边形-Python实现
2016-05-10
二维排样算法-重心临界多边形-Python实现
[TOC]
1. 算法说明
1.1 概述
算法分为两个部分,一是基于重心NFP的零件定位,二是启发式零件排序。
1.2 基于重心NFP的零件定位
该部分通过计算NFP,寻找能使零件重心最低的位置。因为零件重心越低,排样算法的效率越高[1]。
1.2.1 流程图
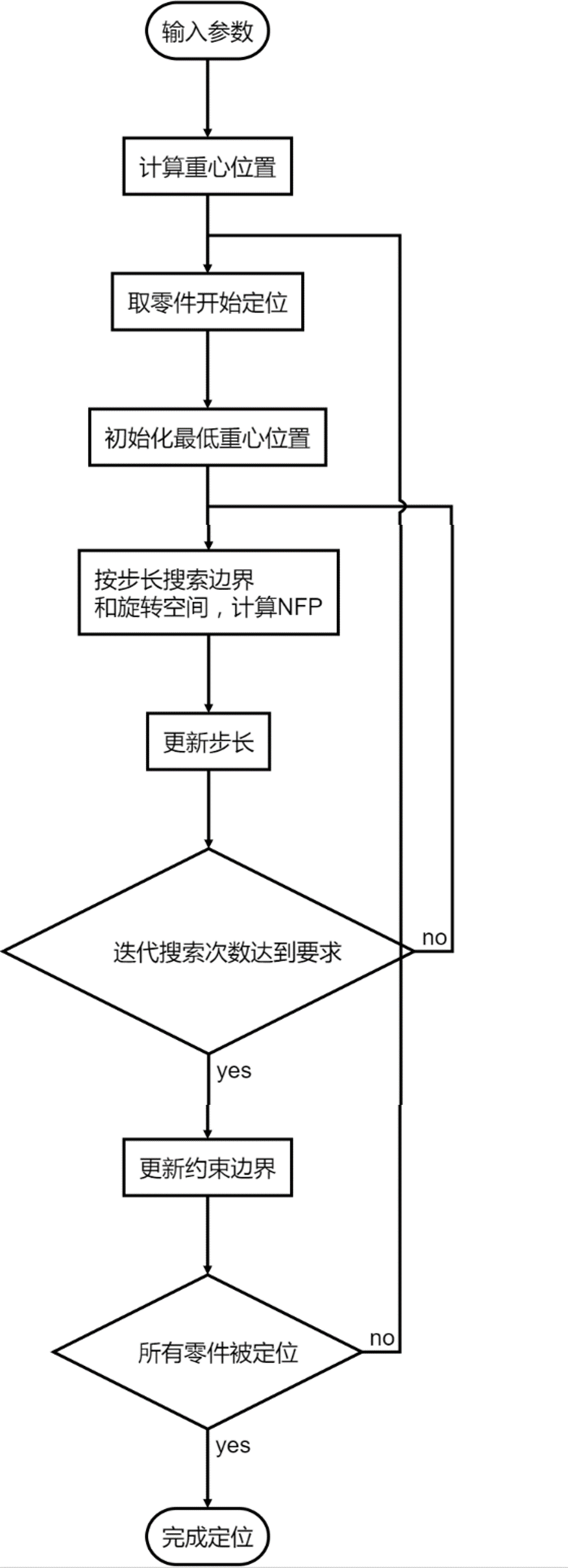
1.2.2 算法描述
Step 1. 输入参数。
- 初始约束:根据板材大小,确认初始边界,以及优先方向,本文优先策略是最低最左。
- 旋转空间:零件旋转角度空间,定义为$Rotation=\left { \rho{1},\rho{2},...,\rho_{n}\right }$。本文只有两个角度,所以$Rotation=\left { 0^{\circ},180^{\circ}\right }$。
- 初始步长以及迭代次数:计算最低重心时用来搜索边界的初始步长$delta_{0}$,还有用来优化精度的迭代搜索次数$k$。
- 零件集合:$P=\left { p{1},p{2},...,p_{m}\right }$,零件个数为$m$。
Step 2. 计算零件重心位置。重心集合定义为 $$center=\begin{pmatrix} c{11} & c{12} & ... & c{1n}\ c{21} & c{22} & ... & c{2n} \ ... & ... & ... & ...\ c{m1} & c{m2} & ... & c{mn} \end{pmatrix}{m\times n}$$
Step 3. 开始循环,依次将零件集合$P$中的元素定位。
Step 4. 初始化最低重心位置$Y_{min}$,初始值为约束边界的最低位置。
Step 5. 开始循环搜素最低重心位置。
- 按步长搜索边界和旋转空间,计算NFP。初始步长为$delta{0}$。得到最低重心位置$Y{min}$,以及相应的$\rho$和边界位置。
- 更新步长,令$delta{i+1}=delta{i}/10$。
- 重复a步骤,共迭代$k$次结束循环。
*Step 6. 根据Step 5得到的$\rho$和边界位置更新边界约束。完成定位。
*Step 7. 重复Step 4,直到零件集合中所有零件都定位到约束空间中,结束循环。
1.2 启发式零件排序
1.2.1 解空间和最优解
上一节中,零件的插入顺序一般按照面积从大到小排列。改变定位顺序,定位也会随之改变。使得利用率(或者排样高度?)最高的定位顺序即为最优解,而解空间就是零件编号的排序方式。
假设零件集合中有$m$个零件,解的个数就是$m!$个,遍历搜索显然是不能接受的。
1.2.2 搜索策略
定义如下三种搜索策略:
- 1级:2-change,随机选取两个零件交换排序位置。
- 2级:n-change,n个零件一组,随机选取两组交换。
- 3级:插入交换,随机选取一个零件插入到其他随机位置。
我们认为以上三种策略的扰动范围依次减小。
1.2.3 模拟退火搜索
模拟退火的基本原理可以参考维基,这里不做太多介绍。下面主要说明本文用到的输入参数和一些算法改进。
(1)参数说明
- 目标函数:$E(S)$定义为当前状态$state$的板材利用率或高度。
- 领域函数:即更新策略,这里我们根据温度不同选择不同的更新策略。目的是越接近最优解的时候能选择扰动范围越小的搜索空间。
- 稳定准则:使用抽样判断是否稳定,判断条件有以下三个,为或关系:
- 检验目标函数的均值是否稳定。
- 连续若干个抽样值变化小于阈值。
- 抽样次数等于给定数量。
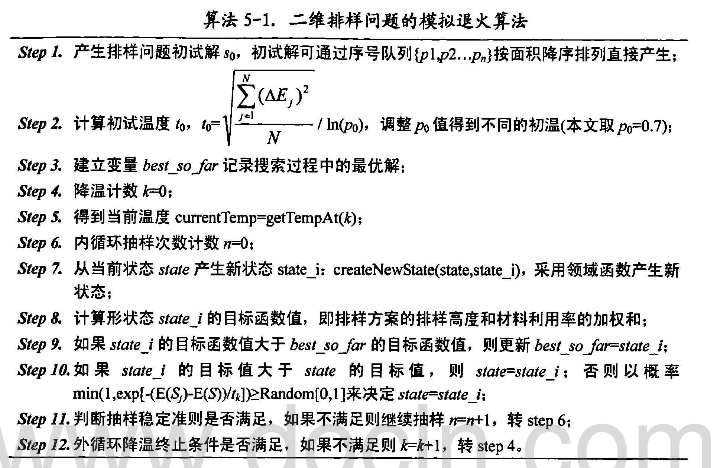
(2)算法流程
这里的算法流程参考上海交通大学刘胡瑶的博士论文:基于临界多边形的二维排样算法研究。
2. 实现方法
2.1 版本说明
- CentOS 7.0
- Python 2.7
- OpenCV 2.4
- numpy
2.2 代码模块
略
[1] 刘胡瑶. 基于临界多边形的二维排样算法研究[D]. 上海: 上海交通大学, 2007.