图片盲水印去除 - OpenCV - C/C++实现
2016-05-16
1. 概述
算法目标是批量检测和去除图片的水印,去除部分使用OpenCV的InPaint接口不难实现,重点在于如何识别和分割水印。
我的想法比较偷懒,主要是以下几步: 1. 将具有相同水印的图片作为一组,取其中一张图片与其他图片(注意用来配准的图像与原图像差别越大越好)进行配准,得到匹配的特征点集即为水印区域。 2. 然后用得到的特征点集匹配相同组的图片,将匹配区域直接分割扣去。 3. 调用OpenCV的InPaint复原图像,完成。
以上算法的本质其实是识别一组图像中的共同元素,然后去除该元素,并进行复原。 (除本篇介绍的方法以外,我还考虑了反向投影方法,将在以后的文章中介绍。)
2. 算法实现
2.1 提取水印

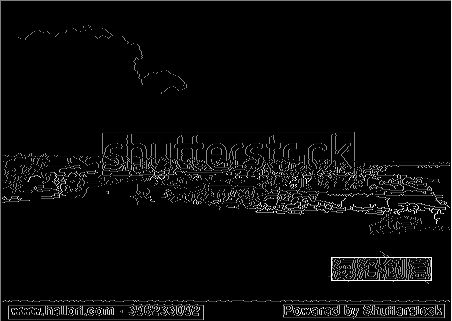
以上两张图像具有相同水印,其实我们有很简便的方法,将两张图像二值化直接相减就能提取到水印。但是并不是所有水印都能找到合适的图片,所以还是需要做图像配准。
这里我选择了使用轮廓特征配准,一方面减少配准算法的复杂度,一方面便于后期的图像分割。首先我们提取图像的Canny算子:
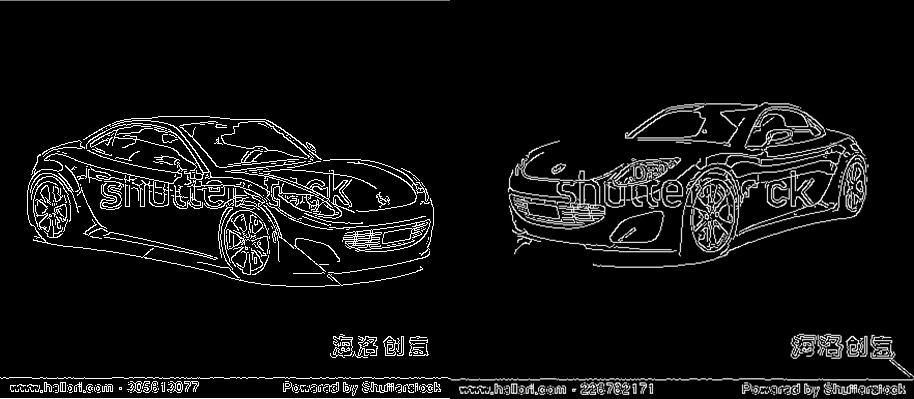
然后我们提取图像的轮廓信息:
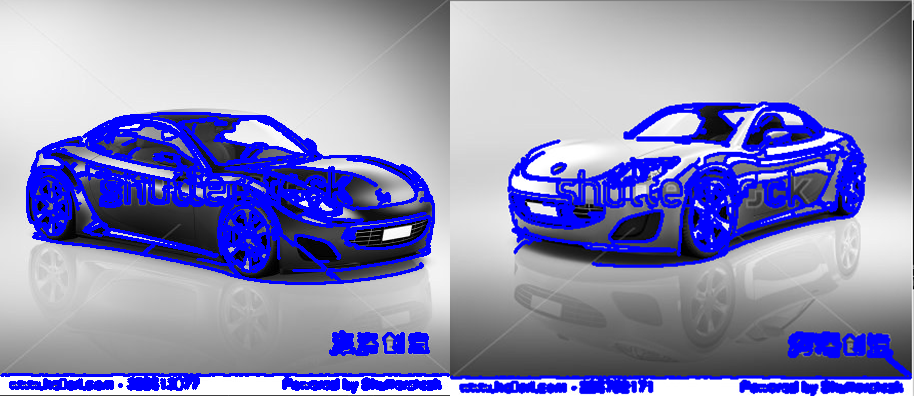
轮廓匹配通常的做法是使用Hu矩,这里我们直接调用了OpenCV的Match方法。
为找出两张图片共同的轮廓,我们以其中一张作为模板,遍历图中的轮廓信息,与另一张图片的轮廓进行匹配。筛选出最匹配的轮廓,即为水印位置。
我们在其中一张图片上标出识别的水印位置:

最后输出水印图像以及轮廓特征的数据。(改进方案:对两张图片匹配的轮廓求交集,这样可以去除水印位置的噪声信息。如果增多图片数量,用两张以上的图片提取水印效果会更好。)
2.2 匹配分割
这一节分为两步,一是识别待复原图像的水印位置,而是将水印作为蒙版分割图像。我们以下图为例演示分割:

识别水印位置:
实际应用场景中,匹配位置不可能非常准确,优化的做法有两种,一种是继续精匹配,一种是识别出大致区域后用漫水填充法分割目标区域。
分割图像:
这里的做法是在识别区域内,将待复原图像的轮廓内像素填充为0。
2.3 图像复原
最后一步,调用InPaint函数复原图像。首先输出一个蒙版图像,作为Mask:
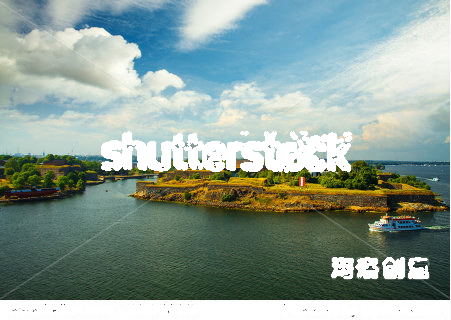
复原之后的效果:

下面是其他用例的复原效果:




3. 存在问题
这个算法的缺陷其实很多,主要包括以下几个:
- 必须分组处理图片。因为是盲水印,我们只能通过图像配准的方法得到水印模板。
- 容易漏过细小轮廓。本文介绍的算法对于矩形水印的处理效果最好,细微的水印很难处理。
- 复原效果依赖参数调节如果要批量处理图片,需要人工调参之后才能使用,否则复原效果无法保证。
- 复杂度较高。当然,主要可能是因为我还没有重构代码……
重构代码后我会放到GitHub上,下面的代码片段只包含识别水印位置、分割图像、复原等功能,当然我还没有重构,结构很乱……
4. 代码示例
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "CEdge.h"
#include <iostream>
#include <stdio.h>
using namespace std;
using namespace cv;
int Match(IplImage* imgRGB, IplImage* imgMask, IplImage* img, char src[], char tmp[])
{
IplImage* imgSrc = img;
IplImage* imgTemp = cvLoadImage(tmp, 0);
IplImage* imgContourSrc = cvCreateImage(cvGetSize(imgSrc), IPL_DEPTH_32F, 1);
IplImage* imgContourTemp = cvCreateImage(cvGetSize(imgTemp), IPL_DEPTH_32F, 1);
IplImage* imgResult = cvCreateImage(sizeResult, IPL_DEPTH_32F, 1);
IplImage* imgPart = cvCreateImage(cvGetSize(imgTemp), IPL_DEPTH_32F, 1);
IplImage* imgContour = cvCreateImage(sizeTemp, IPL_DEPTH_32F, 1);
cvZero(imgContourSrc);
cvZero(imgContourTemp);
CEdge edgeTemp;
edgeTemp.extractEdge(tmp);
imgTemp = edgeTemp.getEdge();
CvSeq * contoursSrc = 0;
CvMemStorage * storageSrc = cvCreateMemStorage(0);
cvFindContours(imgSrc, storageSrc, &contoursSrc, sizeof(CvContour),
CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, cvPoint(0, 0));
cvDrawContours(imgContourSrc, contoursSrc,
CV_RGB(0, 0, 255), CV_RGB(255, 0, 0),
2, -1, 8);
CvSeq * contoursTemp = 0;
CvMemStorage * storageTemp = cvCreateMemStorage(0);
cvFindContours(imgTemp, storageTemp, &contoursTemp, sizeof(CvContour),
CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, cvPoint(0, 0));
cvDrawContours(imgContourTemp, contoursTemp,
CV_RGB(0, 0, 255), CV_RGB(255, 0, 0),
2, -1, 8);
CvSize sizeSrc = cvGetSize(imgSrc);
CvSize sizeTemp = cvGetSize(imgTemp);
CvSize sizeResult = cvSize(sizeSrc.width - sizeTemp.width + 1, sizeSrc.height - sizeTemp.height + 1);
cvMatchTemplate(imgContourSrc, imgContourTemp, imgResult, 4);
float dMax = 0.;
CvPoint point = cvPoint(0, 0);
for (int cx = 0; cx < sizeResult.width; cx++)
{
for (int cy = 0; cy < sizeResult.height; cy++)
{
float fTemp = CV_IMAGE_ELEM(imgResult, float, cy, cx);
if (dMax < fTemp)
{
dMax = fTemp;
point = cvPoint(cx, cy);
}
}
}
CvPoint point2 = cvPoint(point.x + sizeTemp.width, point.y + sizeTemp.height);
cvRectangle(img, point, point2, cvScalar(255));
cvSetImageROI(img, cvRect(point.x, point.y, sizeTemp.width, sizeTemp.height));
CvSeq * contours = 0;
CvMemStorage * storage = cvCreateMemStorage(0);
cvFindContours(imgTemp, storage, &contours, sizeof(CvContour),
CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, cvPoint(0, 0));
cvDrawContours(imgContour, contours,
CV_RGB(0, 0, 255), CV_RGB(0, 0, 255),
2, 5, 8);
int channels = imgRGB->nChannels;
for (int cx = 0; cx < sizeTemp.width; cx++)
{
for (int cy = 0; cy < sizeTemp.height; cy++)
{
float fTemp = CV_IMAGE_ELEM(imgContour, float, cy, cx);
if (255 == fTemp)
{
int j = point.x + cx;
int i = point.y + cy;
(imgRGB->imageData + i*imgRGB->widthStep)[j* channels + 0] = 255;
(imgRGB->imageData + i*imgRGB->widthStep)[j* channels + 1] = 255;
(imgRGB->imageData + i*imgRGB->widthStep)[j* channels + 2] = 255;
}
}
}
for (int cx = 0; cx < sizeTemp.width; cx++)
{
for (int cy = 0; cy < sizeTemp.height; cy++)
{
float fTemp = CV_IMAGE_ELEM(imgContour, float, cy, cx);
if (255 == fTemp)
{
int j = point.x + cx;
int i = point.y + cy;
cvSet2D(imgMask, i, j, 255);
}
}
}
cvResetImageROI(img);
cvReleaseMemStorage(&storage);
cvReleaseMemStorage(&storageSrc);
cvReleaseMemStorage(&storageTemp);
cvReleaseImage(imgSrc);
cvReleaseImage(imgTemp);
cvReleaseImage(imgContour);
cvReleaseImage(imgPart);
cvReleaseImage(imgContourSrc);
cvReleaseImage(imgContourTemp);
cvReleaseImage(imgResult);
return 0;
}
int main()
{
char src[] = "C:\\Users\\zhwei\\Desktop\\InPaint\\test\\test.jpg";
char tmp[] = "C:\\Users\\zhwei\\Desktop\\InPaint\\test\\model.jpg";
IplImage* img = cvLoadImage(src, 0);
IplImage* imgRGB = cvLoadImage(src, 1);
IplImage* imgMask = cvCreateImage(cvGetSize(img), IPL_DEPTH_8U, 1);
IplImage* imgInpaint = cvCreateImage(cvGetSize(img), IPL_DEPTH_8U, 3);
cvZero(imgMask);
CEdge edgeSrc;
edgeSrc.extractEdge(src);
img = edgeSrc.getEdge();
Match(imgRGB, imgMask, img, src, tmp);
cvNamedWindow("img", CV_WINDOW_AUTOSIZE);
cvShowImage("img", img);
cvNamedWindow("RGB", CV_WINDOW_AUTOSIZE);
cvShowImage("RGB", imgRGB);
cvInpaint(imgRGB, imgMask, imgInpaint, 10, CV_INPAINT_NS);
cvNamedWindow("Inpaint", CV_WINDOW_AUTOSIZE);
cvShowImage("Inpaint", imgInpaint);
cvWaitKey(0);
cvDestroyWindow("img");
cvDestroyWindow("RGB");
cvDestroyWindow("Inpaint");
cvReleaseImage(&img);
cvReleaseImage(&imgRGB);
cvReleaseImage(&imgMask);
cvReleaseImage(&imgInpaint);
}